Each being can be represented by an idea, a feeling that drives them in a given direction...
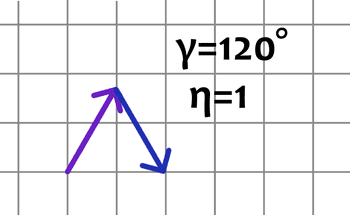
\[ Introducing \space {\color{purple}\vec{a}}ria \space and \space {\color{blue}\vec{b}}oris \]
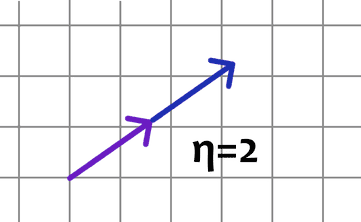
To collaborate, they should aim in the same direction.
On the contrary, if they are going in opposing directions, nothing will happen...
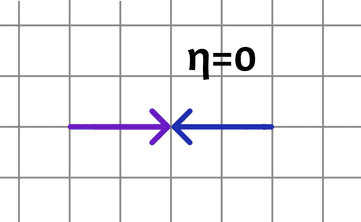
The efficiency of their collaboration is given by \[ \eta = \left\| \vec{a} + \vec{b} \right\| \] Note that all individuals are constrained to have a vector of norm equals to 1.
A case that is often met is the collaboration at right angle, which allows to go forward while joining the complementary skills between the individuals.
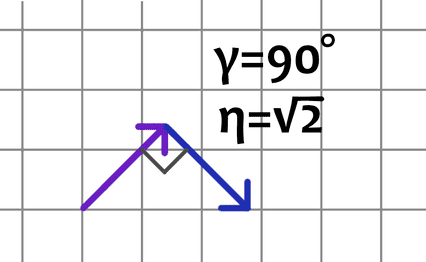
Indeed, individuals always differ, having at least a slightly different direction than another. As mentionned, this can be seen as a positive fact, as this brings more variety when working in a given situation. The angle between two individual wills alignment is found by: \[ \gamma = \arccos \left( \frac{\vec{a} \cdot \vec{b}}{\left\|\vec{a}\right\|\left\|\vec{b}\right\|} \right) \]
Using this angle, we can define the theoretical quality of the collaboration as: \[Q_{th} = \eta \left(\gamma\right) = 1 + \cos\left(\gamma\right) = 1 + \frac{\vec{a} \cdot \vec{b}}{\left\|\vec{a}\right\|\left\|\vec{b}\right\|} \]
Due to the difference between individuals, a perfect collaboration cannot be achieved, and we will thus work to define a more pragmatic metric.
Using this angle, we can define the theoretical quality of the collaboration as: \[Q_{th} = \eta \left(\gamma\right) = 1 + \cos\left(\gamma\right) = 1 + \frac{\vec{a} \cdot \vec{b}}{\left\|\vec{a}\right\|\left\|\vec{b}\right\|} \]
Due to the difference between individuals, a perfect collaboration cannot be achieved, and we will thus work to define a more pragmatic metric.
To help us, we have to analyze the case of the equilateral collaboration: 2 individuals with sufficent diverging goals reach a point that a third would have achieved alone!
This is expressed in the uselessness factor, which penalizes the deviation from the right angle towards the equilateral wills alignment angle : \[Q_{useless} = 2 \left( \sin(\gamma) - \frac{1}{2} \right) = 2 \left( \left\| \vec{a} \times \vec{b} \right\| - \frac{1}{2} \right) \]
We then model the unachievability of the perfect alignment as a linear progression of unlikelihood between the wills alignment angle of 90° and the perfect 0° . \[ Q_{unachievability} = 2 \left( \frac{ \frac{\pi}{2} - \gamma }{\pi} \right) \]
The 2 terms are then combined in a symmetric function : \[ Q_{limits} = \left| Q_{useless} + Q_{unachievability} \right| = 2 \left| \left\| \vec{a} \times \vec{b} \right\| - \frac{1}{2} + \frac{ \frac{\pi}{2} - \gamma }{\pi} \right| = 2 \left| \left\| \vec{a} \times \vec{b} \right\| - \frac{\gamma}{\pi} \right| \]
We obtain the final formulation of the pragmatic quality: \[ Q_{pragma} = 2 \left( 1 + \frac{\vec{a} \cdot \vec{b}}{\left\|\vec{a}\right\|\left\|\vec{b}\right\|} \right) \left| \left\| \vec{a} \times \vec{b} \right\| - \frac{\gamma}{\pi} \right| \]
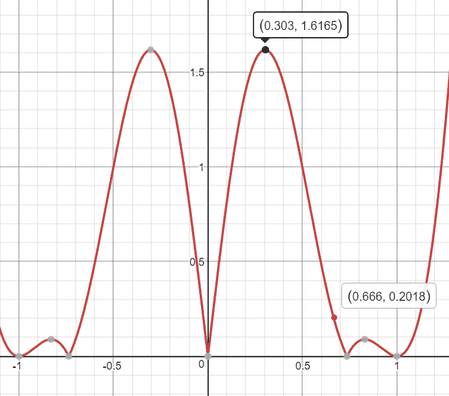
\[ Q_{pragma} \space function, \space angle \space normalized \space by \space \pi \]







 RSS Feed
RSS Feed
